
Tracking error monitoring is disabled during homing.
The maximum permissible torque can be reduced specifically during homing. To do so, parameter P0225 MPRO_REF_HOMING_TMaxScale is set in the range 0-100%. Note that this parameter replaces parameter P 0332 CON_SCON_TMaxScale during the homing run.
Approach block, right.
With P 0169 MPRO_REF_HOMING_MaxDistance the tracking error is specified in the positioning range in which the block is detected.
When the block is detected, the system disengages by half the value in parameter P 0169 MPRO_REF_HOMING_MaxDistance) and the zero point is defined.
An offset can be programmed in the dialog box.
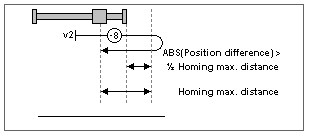
Bild: Approach block, direction right
Approach block, left.
With P 0169 MPRO_REF_HOMING_MaxDistance the tracking error is specified in the positioning range in which the block is detected.
When the block is detected, the system disengages by half the value in parameter P 0169 MPRO_REF_HOMING_MaxDistance) and the zero point is defined.
An offset can be programmed in the dialog box.
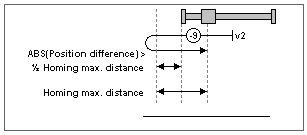
Bild: Approach block, direction left
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE